




ABSTRACT
વોલ ફોલોઅર રોબોટિક્સનો સૌથી મોટો અને એક મહત્વપૂર્ણ વિચાર છે. Wall ફોલોઇંગ એ સ્વાયત્ત રોબોટ છે જે દિવાલની તપાસ કરે છે અને તે પછી શું કરવું તે નક્કી કરે છે. તે આપમેળે ખસેડવા માટે રચાયેલ છે અને પ્લોટ લાઇનને અનુસરે છે.
રોબોટ દિવાલને ઓળખવા માટે ઘણા સેન્સરનો ઉપયોગ કરે છે આમ રોબોટને ટ્રેક પર રહેવા માટે મદદ કરે છે. બે સેન્સરની એરે તેને ચળવળને ચોક્કસ અને લવચીક બનાવે છે. વ્હીલ્સની ગતિને નિયંત્રિત કરવા માટે રોબોટ ડીસી મોટર્સ દ્વારા ચલાવવામાં આવે છે.
Arduino Nano ઇન્ટરફેસનો ઉપયોગ મોટર્સની ગતિને નિયંત્રિત કરવા માટે alલ્ગોરિધમ્સ કરવા અને તેના અમલીકરણ માટે થાય છે, રોબોટને સ્ટીઅરિંગ લાઇન સાથે સરળતાથી મુસાફરી કરવા માટે. આ પ્રોજેક્ટનો હેતુ એલ્ગોરિધમનો અમલ કરવાનો અને નિયંત્રણ પરિમાણોની યોગ્ય ટ્યુનિંગ દ્વારા રોબોટની હિલચાલને નિયંત્રિત કરવાનો અને આ રીતે વધુ સારું પ્રદર્શન પ્રાપ્ત કરવાનો છે. તેનો ઉપયોગ industrial સ્વચાલિત સાધનસામગ્રી, નાના ઘરનાં કાર્યક્રમો વગેરેમાં થઈ શકે છે.
INTRODUCTION
- રોબોટ જેવી બુદ્ધિશાળી મશીનનો ઉપયોગ Wall ફોલોઇંગ, Obstacle detection જેવા વિવિધ એપ્લિકેશન માટે થાય છે.
- તેનો ઉપયોગ વાહનોના સમાંતર પાર્કિંગ અને Auto detection of obstacles માટે થાય છે.
- આ રોબોટ અંતર માપન માટે અલ્ટ્રા સોનિક સેન્સર અને આઇઆર સેન્સરનો ઉપયોગ કરીને બનાવી શકાય છે.
- દિવાલ અનુયાયી માટે નિયંત્રણ એક્ટ્યુએટર્સ એટલે કે મોટર્સનો ઉપયોગ કરીને પ્રદાન કરવામાં આવે છે.
- મોટર નિયંત્રણ માટેની દિશા PWM તકનીકનો ઉપયોગ કરીને કરવામાં આવે છે અને મોટર ડ્રાઇવર L293D નો ઉપયોગ કરીને ચલાવવામાં આવે છે
BLOCK DIAGRAM

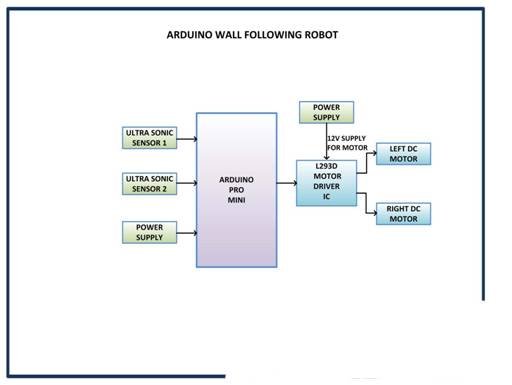
BLOCK DIAGRAM DESCRIPTION
POWER SUPPLY : અમે પાવર સપ્લાય માટે 9 વોલ્ટની બેટરીનો ઉપયોગ કર્યો છે.જે ચલાવવા માટે મોટરને વર્તમાન પ્રદાન કરે છે.
ARDUINO: અરડિનો એક માઇક્રો કંટ્રોલર બોર્ડ છે જેનો ઉપયોગ bot.we કોડના નિયંત્રણ માટે થાય છે અને કોડ ચલાવવા માટે તે આ બોર્ડમાં અપલોડ કરવામાં આવ્યું છે.


ULTRASONIC SENSOR : અલ્ટ્રાસોનિક સેન્સરનો ઉપયોગ theબ્જેક્ટથી અંતરને માપવા માટે કરવામાં આવે છે. તે અલ્ટ્રા સાઉન્ડ વેવ પર કામ કરે છે. તે દિવાલ ને detect કરે છે અને Arduino ને સિગ્નલ આપે છે અને તેના પર Arduino કામ કરે છે .


DC MOTOR : અમે રોબોટ ચલાવવા માટે ડીસી મોટરનો ઉપયોગ કર્યો. અને તે 12 વી ડીસી સપ્લાય પર કામ કરે છે, જે મોટર ડ્રાઇવર આઇ.સી. દ્વારા આપવામાં આવે છે.

MOTOR DRIVER IC : L293D મોટર ડ્રાઇવર આઇસીનો ઉપયોગ અમારા રોબોટમાં રોબોટ ચલાવવા માટે થાય છે .arduino ડીસી મોટર ચલાવવા માટે સક્ષમ નથી, તેથી જ અમે મોટર ડ્રાઇવર આઇ.સી.નો ઉપયોગ કર્યો છે.


WORKING OF WALL FOLLOWER ROBOT
જ્યારે રોબોટ દિવાલ તરફ આગળ વધે છે ત્યારે obstacle સેન્સર દિવાલને detect કરે છે અને બીજી દિશામાં આગળ વધે છે.
જ્યારે ડાબું સેન્સર ચાલુ હોય ત્યારે નિયંત્રણ ઇનપુટ પર આધારીત રોબોટ જમણી દિશામાં આગળ વધે છે.
જ્યારે ડાબી સેન્સર બંધ હોય ત્યારે રોબોટ ડાબી દિશામાં આગળ વધે છે.


વપરાયેલ Components
- Arduino Nano
- Ultrasonic sensor
- DC Motor
- Motor Driver IC
- Battery
- Connecting Wires
- Switch
CODE
.ino અહીંથી ફાઇલ ડાઉનલોડ કરો
APPLICATIONS
- વોલ ફોલોઅર રોબોટ્સ સામાન્ય રીતે ઉદ્યોગો, લશ્કરી એપ્લિકેશનો અને ગ્રાહક એપ્લિકેશનમાં પ્રક્રિયા માટે વપરાય છે.
- તેઓ ખૂબ ઉપયોગી છે કારણ કે તેઓ કોઈપણ દેખરેખ વિના કાર્ય કરી શકે છે.
- તેઓ ઘરની એપ્લિકેશન્સમાં ઉપયોગી છે જેમ કે સફાઈ પ્રક્રિયા, વગેરે.
- તેનો ઉપયોગ ઘરેલુ હેતુ માટે કરી શકાય છે.
- તેનો ઉપયોગ વાહનોના સમાંતર પાર્કિંગ અને અવરોધોને સ્વત. શોધવા માટે થાય છે.
CONCLUSION
અમે એક સરળ વોલ ફોલોઅર રોબોટ બનાવ્યો , જે obstacles શોધી અને અવરોધિત કરી શકે છે. કેટલીક વધારાની સર્કિટરી સાથે, આ રચનાને અન્ય કાર્યો કરવા માટે વધારી શકાય છે જેમ કે કોઈ ચોક્કસ બિંદુનો માર્ગ શોધવો, એક માર્ગ હલ કરતો એલ્ગોરિધમ,લાઇન ફોલોઅર અલ્ગોરિધમ વગેરે./*54745756836*/
){kind=link}