


We know that the Indian rail network is the largest in South Asia and perhaps the most complex in the world. There are so many local trains, fast, fast fast, passenger, goods …. etc. and several multiple procedures. However the schedule is perfect, it cannot be retained. And that’s why the train accidents are more and more common. So why not gather some information drives the motors themselves so they try to avoid accidents. The idea is still no engine note that a red sign will start on the road slowing down and stopping automatically at a certain distance from the signal pole. Then when it turns green the driver can start the train manually and continue.
During the time the train left always closed and turns the red green signal, then it crosses the signal post at low speed then the driver can slowly increase the speed. So now, before the driver signals red the signal from the motor itself gives notice and starts to slow down automatically and then it stops. Driver can relax while driving because he doesn’t have to worry about red sign. Even if you forget any action on the red sign, we can avoid it accidents by applying this idea.
General description:
What we must do we need a signal pole transmitter that is just starting to transmit signals when the red light comes on. If there is a green light, there is no transmission. The motor has a receiver builds these transmission signals and performs passionate actions. The transmitter and the RF type is the receiver with a minimum range of 2 km. so that the train can to slow down and stop in front of the sign post with minimal change distance 100-200 mt. Here in our project we used an IR transmitter and receiver instead of RF for demonstration purposes. But the same idea can be applied with RF a little more cost. Let’s first talk about the exposure model. Please see the figure presented on the next page.
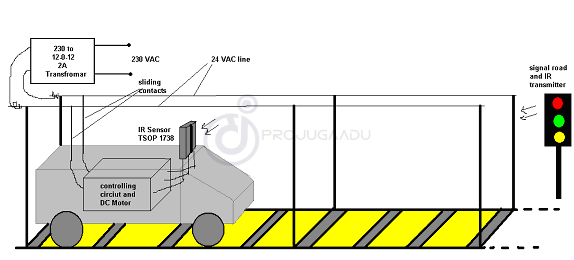
Display model


The train engine also works with the 24 V DC engine we can change their speed easily by changing the operating voltage. Voltage is switched applied in 18 V, 15 V, 12 V and 9 V (minimum speed). 230 VAC are reduced 24 VAC until 12-0-12, 2 amps drop. As shown in the figure, this 24 VAC the line is parallel to the road at the top of the train.
This is followed by mobile cracking line and drive to the internal engine circuit. These slides grow on the train continuous monitoring and supply of the circuit. The IR sensor is placed on top a motor, a signal notification transmitting the IR emitter attached to the signal pole. Train the track is straight and 20 meters long.
The sign post is placed at the end of the track and begins on the train on the opposite side. The project is divided into two parts
- transmitter
- receiver
The transmitter is located in the signal pole and is only activated when the red light is on the receiver is located in a motor displaying infrared signals and takes appropriate action
Signal IR emitter Pole: – The diagram shows the diagram of the IR emitter. Heart IC555 is the circuit. IC555 is only the main component of the circuit.


Connections:
Both connection units are connected in observation mode. The U2 frequency is 0.5 Hz and U1 is 38 KHz. This is decided by the RC components connected to it. The outcome U2 is connected to the reset pin (4) of U1. Thus, the U2 output controls the operation U1 means that it will turn the U1 output on or off. The U1 output is powered by two IR LEDs through the Darlington pair consisting of Q1, Q2 and R5.
The 9 V DC battery is connected to the circuit via the SPDT SW1 switch as shown. Operation: – As shown in the figure when SW1 is in position, as shown by the transmitter is switched on and also the red LED is also ON. When the switch changes position, the red LED and the transmitter are switched off and only The green LED will light up. When the circuit is powered, U2 will start to generate large pulses at every 1 sec. because this pulse is fed to reset pin U1 will generate a square wave of 38 KHz and give it to the IR LEDs.
The IR LEDs will generate a 38 KHz IR beam at the same time. Thus after each second, the 38 KHz IR beam is generated for only one second. This the cycle is repeated until the red light is on. Note: The range of this transmitter is limited to 10 fts Only.89C51 Engine based IR receiver for: -The IR receiver circuit added in the motor is as displayed The main components of the circuit are the TSOP 1738 IR sensor, microcontroller 89C51, ULN2003A current driver chip and all voltage regulating ICs (78XX series).


Connections:
24 VAC is rectified by the diode bridge D1 and filtered through C1 and given to all ICs regulated as input. 7805 is connected to 89C51 and TSOP and also all LEDs. The power 7812 (last) is connected to the commune the coil terminal and the ULN outputs of the outputs of the four regulated ICs are connected to DC motor via relay contacts.
The TSOP power is connected to the P3.3 pin (INT1) of the microcontroller All five LEDs are connected to the P0 port as shown are connected to terminal 1 of port P1.0-P1.3, and the outputs are connected with the second relay coil terminal Operation: -TSOP will detect the 38 KHz IR beam and give the interrupt at 89C51.89C51 will indicate the interrupt event at the first LED (green) and supplies a single special relay via the ULN chip.
When any of the four the relay is powered the engine will receive power from it and start operating voltage is lower, it will run at lower speed So now it is the microcontroller function at receive signal from the IR sensor, the train speed decreases gradually in four steps and then turn it off. And this is accomplished by software embedded in 89C51 does the project work? initially when you turn on the 89C51 power will switch all relays RL1-RL4 one by one. So the engine will receive 9-12-15-18 V of stepped power and gradually increase its speed reaches the maximum speed indicated by the first red LED (P0.0).
Now, if the signal is green, then the train will cross the pole with the same pole, but if it is a signal turns red between then, then the IR sensor will detect the IR beam and interrupt it 89C51For the first interruption 89C51 will stop RL4 and start RL3 now the motor will receive 15 V of power and its speed will be slow.
This is indicated by The second red LED (P0.1) Now the 89C51 will wait some time (2 to 3 seconds) and the train will go started at the same speed. Again, if the red signal is on 89C51 this will be interrupted now the RL2 will start. so now the motor receives 12V and the speed will be again low indicated by the third red LED (P0.2) The same procedure is repeated if 89C51 is interrupted the third time. The engine is now running at the minimum speed (9 V) indicated by the fourth red LED (P0.3) After the same delay on receiving the fourth interruption all relays will be stopped and the engine is now stopped, so the train is also stopped. This is indicated by Green LED. After this interruption it will be deactivated. So when it becomes a red signal the green driver must reset the controller to start the train again.
/*54745756836*/{kind=link}