



ABSTRACT
Wall Follower is one of the biggest and one of the important idea of robotics. A Wall Following is an autonomous robot which detects the wall and decides what to do after it. It is designed to move automatically and follows the plot line.
The robot uses several sensors to identify the wall thus assisting the robot to stay on the track. The array of two sensors makes it movement precise and flexible. The robot is driven by DC motors to control the movement of the wheels.
The Arduino NANO interface is used to perform and implement algorithms to control the speed of the motors, steering the robot to travel along the line smoothly. This project aims to implement the algorithm and control the movement of the robot by proper tuning of the control parameters and thus achieve better performance. It can be used in industrial automated equipmentcarriers, small household applications, etc.
INTRODUCTION
- An intelligent machine like robot is used for various applications such as wall following, obstacle avoidance.
- It is used for parallel parking of vehicles and auto detection of obstacles.
- This robot can be made by using ultra sonic sensors and ir sensors for distance measurement.
- The control for the wall follower is provided by using actuators i.e. motors.
- The direction for motor control is done using PWM technique and are driven by using motor driver L293D
BLOCK DIAGRAM

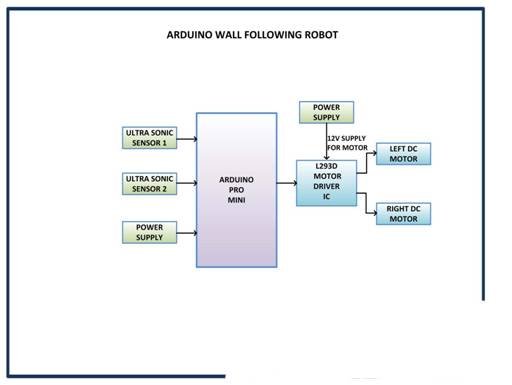
BLOCK DIAGRAM DESCRIPTION
POWER SUPPLY : We have used 9V battery for the Power Supply.which provide current to the motor to run.
ARDUINO: Arduino is a micro controller board which is used for controlling of bot.we have made code and it has been uploaded in this board to run the code .


ULTRASONIC SENSOR : Ultrasonic sensor is used to measure the distance from the object.it works on the ultra sound wave.it detects the wall and gives the signal to the arduino and arduino works on it.


DC MOTOR : We used the DC motor to drive the bot. and it works on the 12V dc supply, Which is given by the motor driver ic.


MOTOR DRIVER IC : L293D motor driver IC is used in our robot to run the bot.arduino is not capable to run the dc motor that’s why we had used the motor driver.


WORKING OF WALL FOLLOWER ROBOT
- When the robot moves towards the wall the obstacle sensor detects the wall and moves in otherdirection.
- Depending upon the control input when the Left sensor is ON the robot moves in right direction.
- When the left sensor is OFF the robot moves in left direction.

SCHEMATIC DIAGRAM


COMPONENTS USED
- Arduino Nano
- Ultrasonic sensor
- DC Motor
- Motor Driver IC
- Battery
- Connecting Wires
- Switch
CODE
ino file download from here
ADVANTAGES
- These types of robot movement are usually automatic.
- The system in the robot is like Once install and forget.
- It’s relatively cheap.
- This type of robot are simple to build.
- They can also be used for long distance
DISADVANTAGES
- It can only follow the obstacle without a big change in angle. This is caused by the hardware limitations because it can only read angle perpendicular to the robot.
- Currently the robot can only follow one side of the obstacle. To prevent collision, we should have ultrasonic sensor on both sides of robot.
- The robot will stop only when an obstacle in front comes into a preset distance
APPLICATIONS
- Wall Follower robots are commonly used for automation process in industries, military applications and consumer applications.
- They are very useful as they can work without any supervision.
- They are useful in home applications such as cleaning process,etc.
- It can be used for domestic purposes.
- It is used for parallel parking of vehicles and auto detection of obstacles.
CONCLUSION
We created a simple automatic wall following robot, which can detect and avoid obstacles. With some extra circuitry, this design could be enhanced to perform other tasks such as finding a path to a specific point, a maze solving algorithm, a line following algorithm, etc.
Special thanks to Prajapati Ankita, Shingala Harsh, SherasiyaMadhavi & Sonani Neel
/*54745756836*/{kind=link}